
Cart Rp 0 (empty)
No products
Rp 0 Total
Product successfully added to your shopping cart
Quantity
Total
There are 0 items in your cart. There is 1 item in your cart.
Total products






DYNAMIXEL-P PM54-060-S250-R
713-493
| Product Stock | back order |
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
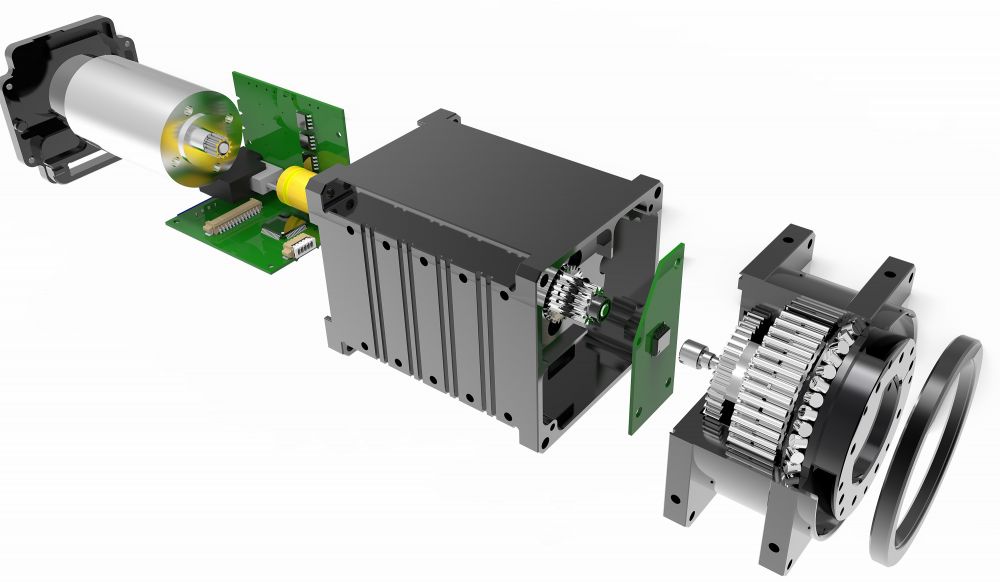
Dynamixel adalah smat servo eksklusif untuk robot yang didalamnya telah terintegrasi penuh dengan motor DC, reduction gearhead, kontroler, driver, serta network dalam satu servo compact. Dynamixel P Series mengimplementasikan removable reduction cycloid gears, sehingga menghasilkan performa dengan presisi tinggi dan resistansi impact.
Spesifikasi
- Mikrokontroler: Cortex-M4 32-bit @ 168 MHz
- Tegangan Kerja: 24 VDC
- Kecepatan: 33.1 RPM (no load)
- Torsi: 10.1 N.m/102.99Kg.cm @24V, 3.0A
- Arus: 3.0A
- Resolusi: 0.0007 deg/pulse
- Step: 502.834 pulse
- Sudut: 360 derajat
- Sensor Posisi: Contactless absolute encoder dan incremental encoder
- Temperatur Kerja: -5°C - 55°C
- Motor: BLDC (Maxon)
- Baudrate: 9600 bps - 10.5 Mbps
- Algoritma Kontrol: PID
- Tipe Gear: Cycloid
- Material Gear: Precious Metal
- Material Case: Precious Metal
- Dimensi: 54.0 x 126.0 x 54.0 mm
- Rasio Gear: 251.4 : 1
- Protokol: Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity)
- Komunikasi: RS485 Multi Drop Bus
- ID: 0 - 252
- Feedback: Posisi, percepatan, arus, suhu, tegangan, port eksternal, dsb
- Versi Protokol: Protocol 2.0
- Mode Operasi: Torque, Velocity, Position, Extended Position, serta PWM Control Mode
- Daya: 60W
- Arus Standby: 40 mA
Fitur Unggulan
- Kontrol torsi berbasis current sensing.
- Intruksi kontrol berbasis posisi, torsi, dan kecepatan.
- Aktuator beresolusi tinggi dengan kombinasi Incremental Encoder dan Contactless Absolute Encoder.
- Menggunakan casing metal untuk durabilitas jangka panjang.
- Dapat digunakan untuk membuat full-size manipulator, pan tilt, robot humanoid, dan sebagainya.
Detail Upgrade pada Dynamixel P Series
- Peningkatan desain dan penambahan konektor JST.
- Peningkatan perlindungan debu
- Peningkatan tabel kontrol (mendukung fungsi pada Dynamixel X Series)
- Peningkatan performa kontrol seperti responsifitas dan resolusi.
- Peningkatan responsifitas komunikasi.
- Peningkatan performa ketahanan panas, noise, dan durabilitas
Isi Dalam Paket :
- 1x PM54-060-S250-R
- 1x Robot Cable-X4P 300mm(Convertible)
- 1x Robot Cable-X4P 300mm
- 1x Power Cable-2P 600mm
- 20x Wrench Bolt WB M3x8
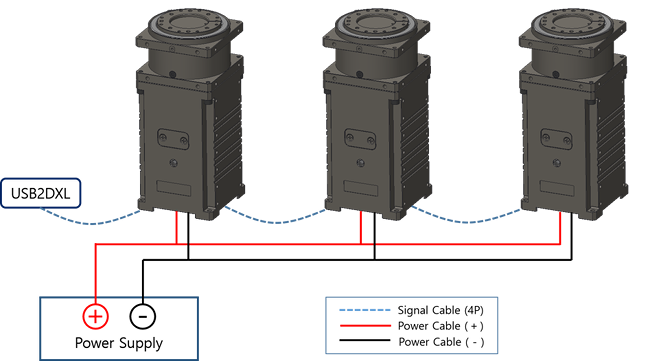
Note: Dynamixel P Series menggunakan tegangan 24V, direkomendasikan menggunakan power supply secara terpisah. Seri 54 tidak bisa menggunakan frame jenis lama. Tidak kompatibel dengan FRP54-H110/120/210/220.
Dokumen
- E-Manual : [ Link ]
- Drawing : [ Link ]
- Panduan Kompatibilitas : [ Link ]
- Tabel Perbandingan Dynamixel : [ Link ]
- Dynamixel SDK : [ Link ]
Produk Terkait
- Servo Dynamixel
- DYNAMIXEL-P PM54-040-S250-R
- DYNAMIXEL-P H54-200-S500-R
- DYNAMIXEL-P H54-200-S500-R
- DYNAMIXEL-P PM54-040-S250-R
- USB Communication Converter U2D2
- OpenCM9.04-C
- OpenCR 1.0
- OpenCM 485 Expansion Board

No customer comments for the moment.