














Cara Kreatif Modifikasi OpenManipulator-X Menjadi Robot SCARA

SCARA adalah singkatan dari Selective Compliance Assembly Robot Arm, yang merujuk pada jenis robot manipulator dengan struktur khusus. Robot SCARA memiliki empat derajat kebebasan (DoF) yang memungkinkannya untuk melakukan gerakan yang kompleks dan presisi tinggi. Struktur robot SCARA terdiri dari dua lengan paralel yang dapat bergerak secara horizontal, dengan lengan kedua yang dapat bergerak secara vertikal. Lengan ini memungkinkan robot SCARA untuk melakukan gerakan vertikal dan horizontal dengan presisi yang tinggi. Selain itu, lengan ini juga memiliki tingkat kompliansi yang terbatas, yang berarti mereka relatif kaku dalam menjaga posisi, sehingga mampu mempertahankan akurasi yang tinggi.
Keuntungan utama dari robot SCARA adalah kemampuannya untuk melakukan tugas-tugas yang membutuhkan presisi tinggi dan kecepatan yang tinggi. Dalam industri manufaktur, robot SCARA sering digunakan untuk perakitan produk elektronik, proses produksi, quality control, dan pengemasan. Gerakan presisi dan kecepatan tinggi yang dimiliki oleh robot SCARA memungkinkannya untuk melakukan tugas-tugas ini dengan efisiensi dan akurasi yang tinggi, sehingga mengurangi waktu dan biaya produksi. Selain itu, robot SCARA juga memiliki keunggulan dalam fleksibilitas. Mereka dapat dengan mudah diprogram ulang untuk melakukan tugas-tugas yang berbeda, sehingga dapat digunakan dalam berbagai aplikasi dan lingkungan kerja. Dengan penggunaan perangkat lunak yang tepat, robot SCARA dapat dikendalikan dengan mudah dan diintegrasikan dengan sistem otomatisasi yang ada.
Kabar baik bagi teman-teman yang ingin melakukan riset tentang robot SCARA, karena ada satu modul pembelajaran arm robot yang dapat kita gunakan untuk melakukan penelitian mengenai sistem SCARA. Robot yang dimaksud adalah OpenManipulator-X yaitu sebuah robot arm buatan Robotis yang sudah sejak lama dipercaya akan kualitasnya sebagai perangkat untuk riset berbagai hal tentang robot arm. Hal ini tidak lepas dari konsep awal diciptakannya produk ini, yaitu modular sekaligus open-source, sehingga sebagai pengguna kita bisa mempelajari banyak hal, berinovasi, dan memodifikasi segala hal baik hardware maupun software pada robot ini tanpa ada batasan.
Aplikasi OpenManipulator-X Sebagai Robot SCARA
OpenManipulator-X sejatinya menggunakan servo canggih Dynamixel XM430-W350-T sebagai penggeraknya, dengan kombinasi 5 buah servo yang tersemat di rangkanya, OpenManipulator-X mampu bergerak dengan 5 sumbu derajat kebebasan atau Degree of Freedom (DoF). Namun secara default robot ini didesain dengan bentuk Arm manipulator Robot, sehingga untuk merubahnya ke model robot SCARA, kita perlu melakukan beberapa modifikasi terhadap rangka mekanikalnya. Jika teman - teman ingin mencoba aplikasi ini, berikut langkah - langkah yang harus dilakukan.
- Untuk membuat proyek ini, hal pertama harus dilakukan adalah mempersiapkan hardware yang akan digunakan. Hardware yang dibutuhkan untuk project ini antara lain sebuah mikrokontroler (arduino compatible) yang bernama OpenCR 1.0 , OpenManipulator-X yang nantinya akan kita gunakan servo Dynamixel XM430-W350-T nya sebagai aktuator, dan sebuah komputer atau laptop untuk memprogram OpenCR 1.0.

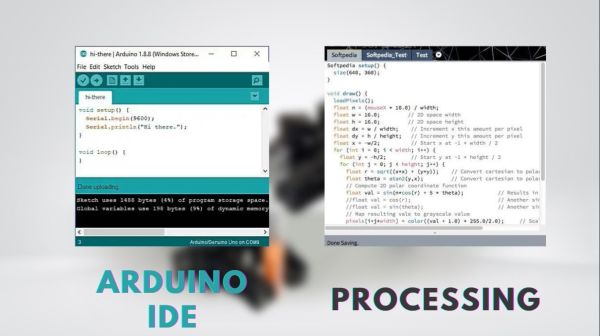
- Untuk softwareyang digunakan nantinya ada dua jenis, yaitu Arduino IDE dan Processing. Jika teman - teman sudah memiliki kedua software ini maka bisa lanjut, namun jika belum maka teman - teman bisa mendownload-nya pada link di bawah ini.
Arduino IDE : Download
Processing : Download
- Kemudian kita juga membutuhkan komponenmodifikasi yang digunakan untuk mengubah model standar OpenManipulator-X menjadi robot SCARA, untuk file nya bisa di unduh pada link
SCARA 3D Model : https://goo.gl/oVsK8m
Setelah terunduh teman - teman bisa mencetak file tersebut ke objek 3D, jika memiliki mesin 3D printer maka teman - teman bisa langsung mencetak file tersebut namun jika tidak memiliki mesin 3D printer maka teman - teman bisa mencetaknya ke jasa percetakan 3D yang ada di daerah teman - teman.

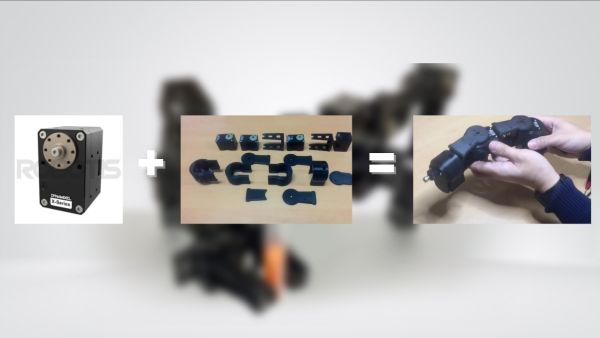
- Setelah tercetak, teman - teman bisa membongkar OpenManipulator-X untuk diambil servo Dynamixel XM430-W350-T nya, kemudian kita rakit ulang menggunakan komponen custom yang tadi sudah kita cetak menggunakan mesin 3D printer sesuai bentuk gambar di bawah ini.
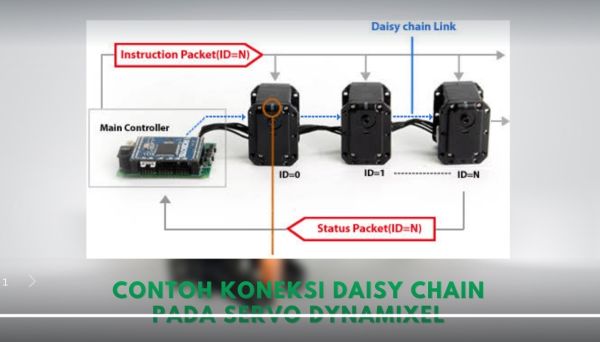
- Jika semua komponensudah terakit selanjutnya kita hubungkan kabel servo XM430-W350-T yang sudah dihubungkan satu sama lain dengan konfigurasi daisy chain ke soket TTL yang ada pada board OpenCR 1.0.
- Selanjutnya kita unduh source code untuk Arduino dan Processing yang akan diprogram ke board OpenCR 1.0 pada link berikut : OpenManipulator-X SCARA Example
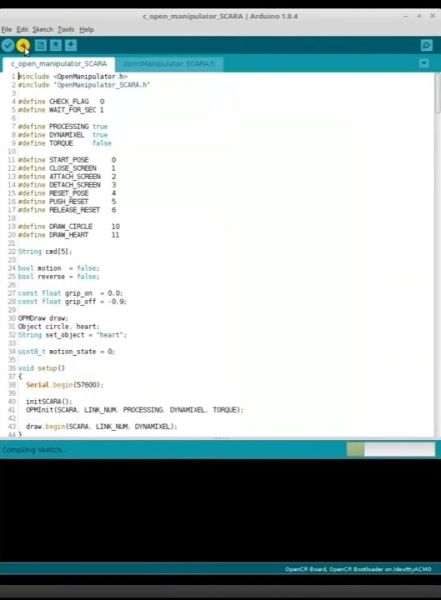
- Jika sudah selesai diunduhkemudian kita buka software Arduino IDE kemudian buka sketch yang tadi didownload tadi pada direktori
/OpenManipulator-X SCARA Example/Scara - Arduino/open_manipulator_scara/open_manipulator_scara.ino
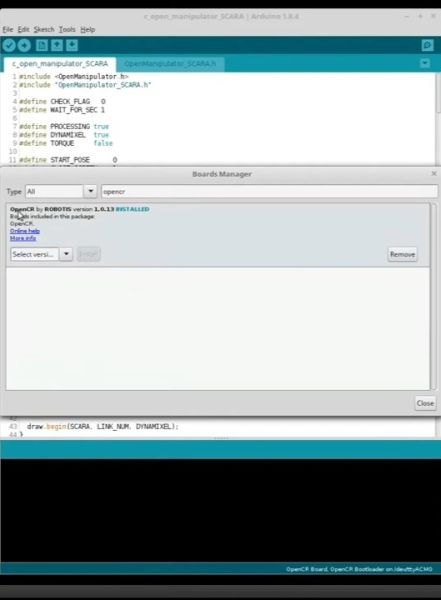
- Apabila teman - teman baru pertama kali menggunakan OpenCR 1.0 ke Arduino IDE, maka kita perlu melakukan instalasi board-nya terlebih dahulu. Untuk melakukan proses ini pastikan komputer teman - teman terhubung dengan jaringan internet, karena untuk data board OpenCR 1.0 nya akan diunduh secara online.
- Untuk langkah instalasinya yaitu silahkan pilih menu Tools - Board Manager - lalu ketik kata kunci "opencr"- lalu pilih versi driver board terbaru dan klik install
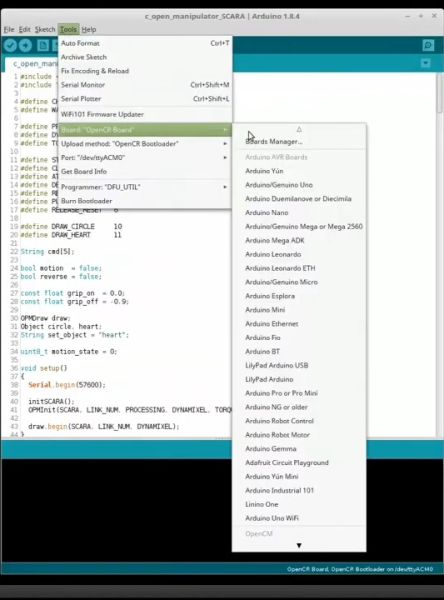
- Jika sudah terinstal, selanjutnya kita harus memilih OpenCR sebagai board yang akan diprogram melalui Arduino IDE, caranya klik Tools - Boards- lalu pilih "OpenCR board", lalu kita bisa melakukan upload dengan menekan tombol upload.
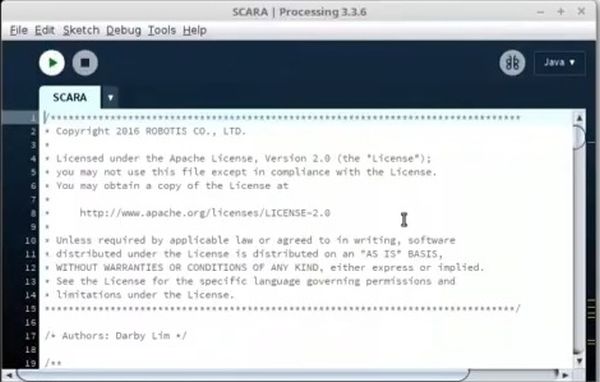
- Setelah proses uploadsukses lalu kita pindah ke software yang sudah diunduh tadi, kemudian klik File - Open - lalu pilih file script yang sudah diunduh tadi (/OpenManipulator-X SCARA Example/Scara - Processing/Scara.pde) dan tekan tombol play.
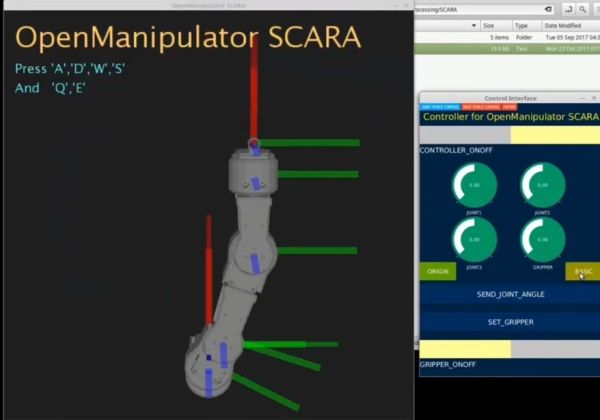
- Jika semua proses sudah diikuti maka akan muncul tampilan GUI seperti gambar di bawah ini dan OpenManipulator-X X pun sudah berhasil dimodif menjadi robot SCARA serta robot dapat dikontrol secarareal time melalui GUI yang tampil di layar.
Sumber : https://youtu.be/4PK3I1JfSzc
Selamat Mencoba!
All trademarks, company names, product names and trade names are the property of their respective owners. All softwares are copyright by their respective creators and/or software publishers.