














Genuino 101 Balancing Robot Kit: Robot Open Source yang Bebas Kamu Kembangkan Sesuka Hati

Gambar 1.0 Genuino 101 Balancing Robot Kit
Di era modern ini perkembangan platform open source tidak dapat kita pungkiri lagi adanya. Fleksibilitas yang tercipta di lingkup open source nyatanya dapat memikat para pengembang/developer untuk ikut terjun ke dalamnya. Open source memberikan kebebasan ruang bagi para pengembang untuk mengubah, memodifikasi, mengembangkan, dan menyebarluaskan suatu piranti yang bersifat open source secara legal tanpa perlu khawatir akan terjadi pelanggaran lisensi.
Dahulu mungkin kita mengenal piranti Open source hanya sebatas software namun berkat perkembangan teknologi yang semakin canggih lingkup piranti Open source saat ini juga telah menjamur ke sektor hardware. Industri manufaktur hardware dari berbagai negara saling berkompetisi untuk menghadirkan bermacam - macam perangkat bersifat Open source guna menjemput potensi pasar yang kian hari semakin menjanjikan. Di sisi lain, dengan banyaknya variasi software maupun hardware yang bersifat Open source di pasaran tentunya merupakan keuntungan tersendiri bagi para pengembang. Karena dengan hadirnya berbagai variasi software maupun hardware bersifat Open source tersebut akan membuat para pengembang lebih leluasa dalam mengapresiasikan ide - ide brilian mereka. Salah satu contoh hasil pengembangan dari hardware - hardware Open source tersebut ialah pada "Genuino 101 Balancing Robot Kit" yang telah berhasil di built-up oleh tim dari divisi pengembangan Digiware.
Apa sih Genuino 101 Balancing Robot Kit itu?
Genuino 101 Balancing Robot Kit adalah sebuah robot beroda dua buatan Digiware yang mampu menjaga keseimbangannya supaya dapat berdiri secara tegak lurus di bidang datar. Sama seperti balancing robot pada umumnya, robot ini terdiri dari 2 buah roda bermotor yang dipasang secara sejajar di bagian kanan dan kiri bodi robot. Satu hal yang unik dari robot ini yaitu terletak pada bagian kontrollernya. Robot ini menggunakan papan mikrokontroller Genuino 101 sebagai pusat pengendalian seluruh aktivitasnya. Genuino 101 merupakan papan mikrokontroler multi talenta yang di dalamnya sudah dibekali beberapa hardware dengan spesifikasi kelas atas. Genuino 101 ini mengusung sistem intergrated sensors and wireless communication line, sehingga sensor (gyroscope dan accelerometer) dan jalur komunikasi nirkabel (Bluetooth Low Energy) secara pabrikan telah terintegrasi dalam sebuah papan mikrokontroller yang ringkas dan efisien. Selain itu, Genuino 101 Balancing Robot Kit ini juga menawarkan beberapa fitur yang cukup menarik, seperti disediakan LED dan LCD 8x2 sebagai indikator status kerja robot, bersifat Open source sehingga Anda bebas memodifikasi seluruh elemen pada robot ini, dan ditenagai oleh baterai lithium polymer 1000 mA yang tahan lama. Berdasarkan hasil pengujian, dalam kondisi baterai penuh robot ini mampu bekerja secara non-stop selama kurang lebih 2.5 jam lamanya.
Penerapan Teknologi Balancing Robot di Dunia Nyata
Dalam dunia nyata balancing robot memiliki berbagai macam bentuk dan kegunaan. Teknologi balancing robot memang akhir-akhir ini sedang menjadi trending topic di berbagai negara. Teknologi balancing robot ini banyak diterapkan pada sistem inventory industri, transportasi, dan media pengembangan & edukasi. Berdasarkan bentuknya balancing robot terdiri dari two wheel self ballancing mobile robot, solo wheel transporter, one wheel balancing robot, dan lain sebagainya. Genuino101 balancing robot Kit merupakan salah satu pengembangan dari two wheel self ballancing mobile robot. Prinsip kerja Genuino101 balancing robot Kit pada dasarnya sangat mirip dengan Segway, bedanya yaitu hanya terletak pada tujuan fungsionalnya. Segway diciptakan untuk menghadirkan alat transportasi alternatif yang fleksibel dan ramah lingkungan bagi manusia, sedangkan Genuino 101 balancing robot Kit ini diciptakan sebagai media edukasi untuk memahami konsep dasar teknologi balancing robot. Dengan memahami konsep dasar tersebut, diharapkan kita mampu menghadirkan suatu inovasi baru berbasis teknologi balancing robot yang dapat berguna di masa mendatang.

Gambar 1.1 Penerapan Segway Dalam Departemen Kepolisian

Gambar 1.2 Penerapan Segway sebagai sarana hiburan
Prinsip Kerja Genuino 101 Balancing Robot
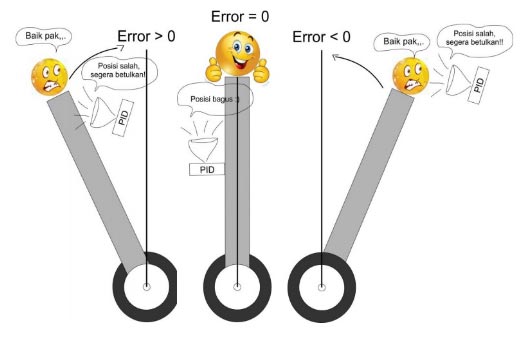
Pada dasarnya, Genuino 101 Balancing Robot Kit ini menerapkan prinsip kontrol Proportional, Integral, dan Derivatif (PID) dalam sistem kerjanya. Sistem kontrol PID adalah mekanisme kontrol umpan balik yang biasa diterapkan pada sistem kontrol industri. Sebuah kontroler PID secara kontinu akan menghitung nilai kesalahan sebagai beda antara set point yang diinginkan dengan variabel proses yang terukur. Kontroler PID akan berusaha untuk meminimalkan nilai kesalahan akibat penyimpangan variabel terhadap set point, sehingga dapat diperoleh kondisi yang setimbang dengan set point. Berikut ini ilustrasi sederhana dari sistem kontrol PID tersebut.
Gambar 1.0 Genuino 101 Balancing Robot Kit
Genuino 101 Balancing Robot Kit ini menggunakan Genuino 101 sebagai hardware yang bertugas untuk menjalankan seluruh proses kontrol sekaligus measurement PID. Genuino 101 ini akan membandingkan beberapa parameter/variabel yang diperoleh dari hasil pembacaan sensor gyrorscope & accelerometer terhadap nilai set poin. Hasil perbandingan antara variabel dan set point tersebut lantas akan digunakan oleh Genuino 101 untuk menentukan besar arus, tegangan, dan polaritas yang harus diberikan kepada 2 buah motor penggerak robot, supaya tercipta kondisi robot yang dapat berdiri seimbang.
Karena sifatnya yang juga open source maka Anda juga dibebaskan untuk memodifikasi program maupun hardware input/output yang terdapat pada Genuino 101 Balancing Robot Kit ini sesuka hati. Sebagai contoh, Anda dapat menambahkan sensor ultrasonic untuk memberikan fungsi object avoider pada Robot Balancing ini atau Anda juga bisa menambahkan fungsi remote melalui smartphone dengan memanfaatkan fitur Bluetooth Low Energy yang sudah ter-embed pada board Genuino 101.
Hardware Utama Pada Genuino 101 Balancing Robot Kit
Dalam mekanisme kerjanya, Genuino 101 Balancing Robot kit ini terdiri dari beberapa hardware utama yang bertanggung jawab dalam menjaga kestabilan kinerjanya. Beberapa hardware tersebut antara lain :
1. Genuino 101

Gambar 1.4 Genuino 101
Genuino 101 merupakan “otak” dari segala aktivitas yang dijalankan oleh Genuino 101 Balancing Robot Kit. Genuino 101 adalah sebuah mikrokontroller hasil kerjasama 2 vendor teknologi ternama yaitu Intel® dan Arduino™. Genuino 101 ini merupakan penggabungan antara teknologi prosesor powerfull dari Intel dan desain papan mikrokontroller minimalis dari Arduino. Genuino 101 ini mengadopsi prosesor Intel Curie™ berarsitektur ganda (Quark x86 dan ARC 32-bit) dengan clockspeed maksimum 32 MHz. Mengapa harus Genuino 101? Karena papan mikrokontroller ini menawarkan beberapa kelebihan dibanding papan mikrokontroller lain. Apa sajakah kelebihan dari Genuino 101 ini? Mari kita simak penjelasan dibawah ini.
* Bersifat Open Source
Fitur ini merupakan fitur yang sangat vital bagi pengembangan project Anda, karena vendor (dalam kasus ini adalah Arduino™ dan Intel®) memberikan hak penuh kepada Anda untuk memodifikasi hardware maupun software yang terdapat pada Arduino/Genuino 101 secara legal. Di sisi lain, karena sifatnya yang open source maka Anda akan sangat mudah dalam menemukan forum-forum terkait pembahasan seputar Genuino 101 ini. Forum-forum tersebut sangat berguna bagi Anda ketika mengalami kendala mengenai Genuino 101, entah itu terkait masalah hardware maupun software yang tertanam pada papan mikrokontroler ini. Dengan adanya forum-forum tersebut maka Anda akan dipersilahkan untuk bertanya mengenai kendala teknis yang sedang Anda hadapi kepada sesama pengembang di dalam forum tersebut secara bebas dan gratis tentunya. Salah satu forum pembahasan Arduino terbesar dapat Anda kunjungi di sini.
* Prosesor Intel Curie™ yang Terbukti Lebih Cepat
Intel Curie™ merupakan prosesor besutan Intel® yang didalamnya sudah mengadopsi arsitektur ganda yaitu Quark x86 dan ARC 32-bit. Prosesor ini pada dasarnya memang didesain khusus untuk memenuhi kebutuhan physical computing bagi perangkat-perangkat wearable/em> karena ukurannya yang super kecil namun performanya sangat dapat diandalkan. Prosesor ini dilengkapi 80 Kb SRAM, 384 Kb flash memory, 32 MHz clockspeed, dan sudah mendukung Real Time Operating System (RTOS). Secara keseluruhan, prosesor Intel Curie™ memiliki spesifikasi diatas rata-rata prosesor sekelasnya. Berikut ini adalah tabel komparasi prosesor Intel Curie™ dengan prosesor mikrokontroller lain:
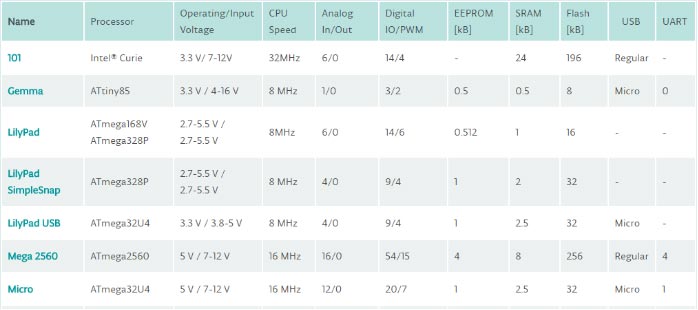
Gambar 1.5 Tabel Perbandingan Prosesor Mikrokontroller
* Built-in Gyroscope & Accelerometer Sensor
Gyroscope & Accelerometer merupakan sensor utama pada Genuino 101 Balancing Robot Kit ini. Sensor ini berfungsi untuk menghasilkan beberapa parameter yang mana parameter-parameter tersebut akan digunakan oleh Genuino 101 untuk menghasilkan komparasi terhadap set point. Dengan kata lain sensor Gyroscope & Accelerometer ini adalah sensor yang berfungsi untuk menjaga posisi robot agar tetap seimbang sesuai dengan set point yang telah ditentukan pada awal pengoperasian. Dan kabar gembiranya pada Genuino 101 ini telah terintegrasi dengan sensor Gyroscope & Accelerometer tersebut sehingga Anda dapat lebih menghemat biaya dan tempat.
* Built-in Bluetooth Low Energy
Bluetooth low energy (BLE)/Bluetooth 4.0 adalah penyempurnaan dari bluetooth<e/m> 3.0 yang merupakan versi pendahulunya. BLE pertama kali diperkenalkan ke publik pada tahun 2010. Pada BLE ini telah dilakukan beberapa peningkatan terhadap efisiensi daya, protokol, dan kecepatan transfer data. BLE saat ini merupakan salah satu jenis konektifitas yang umum digunakan pada smartphone, laptop, smart-system, dan perangkat-perangkat wearable. BLE menawarkan akses data yang cepat dan stabil dengan tingkat konsumsi daya yang sangat rendah, sehingga tidak heran jika saat ini BLE ini menjadi pilihan utama dalam aplikasi komunikasi nirkabel jarak dekat yang membutuhkan durabilitas tinggi. Dan kabar baiknya lagi fitur konektifitas BLE ini juga telah terintegrasi dengan Genuino 101.
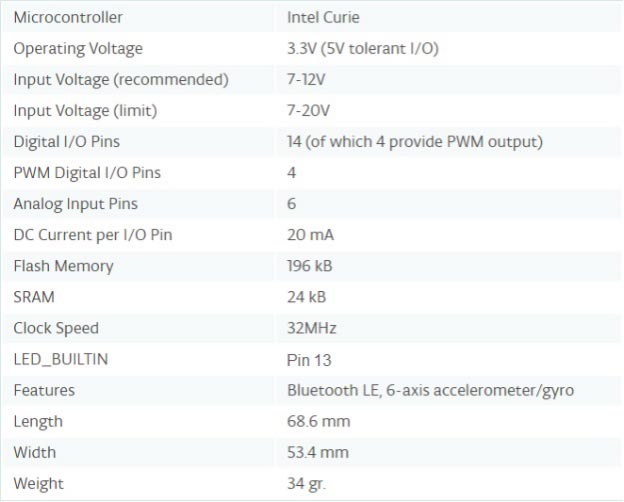
Gambar 1.6 Spesifikasi Genuino 101
2. EMS 2A Dual H-Bridge

Gambar 1.7 EMS 2A Dual H-Bridge
EMS 2A Dual H-Bridge merupakan driver motor H-Bridge yang dirancang untuk menghasilkan drive dua arah dengan arus kontinu hingga 2 ampere pada tegangan 4,8 hingga 46 volt. Modul ini dapat mengendalikan beban-beban induktif seperti motor DC, motor stepper, koil relay, selenoida, dan beban-beban induktif lainnya. Pada Genuino 101 Balancing Robot Kit, EMS 2A Dual H Bridge ini difungsikan sebagai driver yang akan menyuplai tegangan 12 volt dengan arus hingga 2 ampere pada masing-masing motor DC yang terdapat pada bagian mekanis robot.
| Spesifikasi EMS 2A Dual H-Bridge: | |
|---|---|
| Catu Daya | : 5 VDC |
| Tegangan Beban | : 4.8 - 46 V |
| Output Arus | : 2 A, atau 4 A (paralel) |
| Jumlah Driver | : 2 Driver H-Bridge |
| Level Tegangan | : TTL dan CMOS |
| Fitur | : Proteksi over-temperature, kompatibel dengan SPC gamepad |
3. Board Driver Motor to Arduino
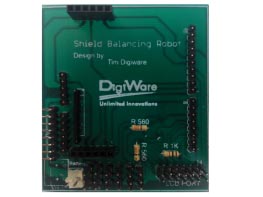
Gambar 1.5 Board Driver Motor to Arduino
Board Driver Motor to Arduino merupakan modul yang berfungsi sebagai sendi pada Genuino 101 Balancing Robot Kit. Modul ini bertugas menghubungkan Genuino 101, driver motor, LED dan Switch, Baterai, LCD, dan input analog kedalam satu board yang ringkas. Dengan adanya board ini proses wiring Genuino 101 Balancing Robot Kit akan lebih mudah dan simple tentunya.
Diagram Koneksi Antar Hardware
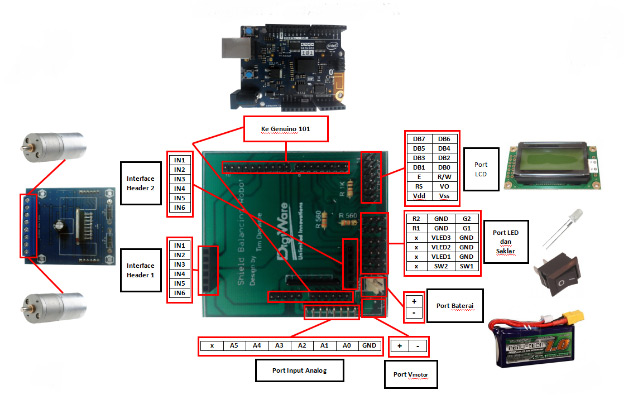
Gambar 1.6 Diagram koneksi Antar Hardware
Proses Downloading Program ke Genuino 101 Balancing Robot Kit
- Unduhlah software Arduino IDE sesuai sistem operasi pada komputer Anda di https://www.arduino.cc/en/Main/Software.
- Kemudian install software Arduino IDE tersebut ke direktori C:/
- Setelah itu unduhlah sketch/program Genuino101 Balancing Robot Kit di sini (disesuaikan dengan nomor seri yang terdapat pada Genuino Balancing Robot Kit Anda, misal: BR001, BR003, BR005, dst.).
- Ekstrak sketch yang telah didownload ke sembarang direktori pada komputer Anda.
- Setelah proses instalasi selesai, buka software Arduino IDE tersebut lalu hubungkan Genuino 101 pada Balancing Robot ke komputer menggunakan kabel USB printer.
- Tambahkan library board Arduino 101 dengan cara memilih Tools - Board - Boards Manager - Intel Curie Board by Intel - Install (Komputer Anda harus terkoneksi ke internet).
- Aturlah board yang akan diprogram dengan cara memilih menu Tools - Board - Arduino/Genuino 101.
- Aturlah COM port yang akan digunakan dengan memilih menu Tools - Port - COMx (COMx disesuaikan dengan COM port Arduino/Genuino 101 yang terbaca oleh device manager).
- Kemudian buka sketch program Genuino 101 Balancing Robot Kit yang telah diekstrak tadi dengan memilih menu File - Open - Genuino101 Balancing Robot Kit.ino (lokasi file BalancingRobot.ino disesuaikan dengan direktori pengekstrakan Anda sebelumnya).
- Setelah sketch terbuka anda dapat langsung mendownload program ke Genuino 101 Balancing Robot Kit dengan cara mengklik tombol upload

- Tunggu sejenak selama 5 detik hingga program siap untuk dijalankan.
Tutorial Cara Menjalankan Genuino 101 Balancing Robot Kit
- Posisikan Robot Balancing tegak lurus dengan lantai/permukaan yang akan menjadi pijakan robot. Posisi tegak lurus ini bertujuan untuk kalibrasi posisi awal (set point).
- Tekan tombol On/Off pada bagian atas robot.
- LCD akan menampilkan pesan “wait…”. Tunggu selama 3 detik robot akan melakukan proses kalibrasi. Pada saat kalibrasi, jangan menggerakan robot dan tahan robot pada posisi tegak lurus dengan posisi lantai/permukaan.
- Setelah 3 detik robot akan menginformasikan bahwa dia sudah “ready” dan pada lcd display akan menampilkan pesan “Go”. Robot balancing siap beraksi
- Robot balancing siap beraksi
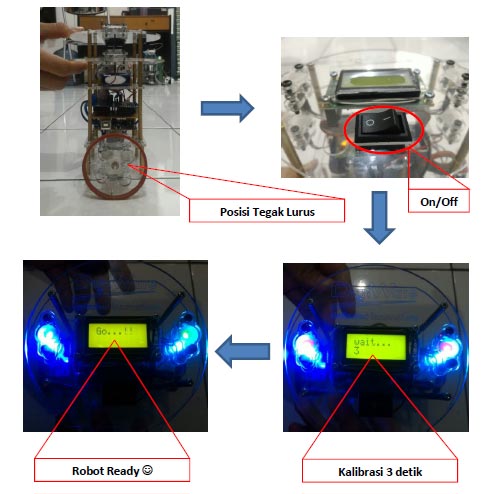
Gambar 1.7 Tutorial Cara Menjalankan Genuino 101 Balancing Robot Kit
Selamat berkarya Kawan!
All trademarks, company names, product names and trade names are the property of their respective owners.
All softwares are copyright by their respective creators and/or software publishers.