














Wearable Controlled Arm Robot
Robotika terapan untuk bidang industri memang menarik untuk dipelajari. Terlebih jika dipraktikan langsung pastinya akan semakin mengasyikan. Aplikasi kali ini akan memainkan robot lengan menggunakan perangkat wearable sederhana yang akan kita buat sendiri. Perangkat wearable tersusun atas flex sensor, IMU 10 DOF, sensor otot (EMG). Tiap-tiap sensor akan berperan dalam pergerakan tiap sendi robot lengan. Aplikasi ini juga terinspirasi dari film Pasific Rim, Elysium, Real Steel, Gundam Wing, dan Robocop.
Berikut adalah perlengkapan yang digunakan pada aplikasi kali ini:
- 1x DT-AVR Uno R3 / Genuino Uno / Genuino 101 / Arduino compatible lainnya.
- 2x Flex Sensor 4.5 inch (Kode Stok: 296-110)
- 1x 10 DOF IMU Sensor (B) Low Power Consumption (Kode Stok: 297-015)
- 1x Grove - EMG Detector (Kode Stok: 296-225)
- 1x Robot lengan berbasis servo Dynamixel AX-12+
- 1x Switching Adaptor 12V/3A (Kode Stok: 644-110)
- 1x Switching Adaptor 12V/1A (Kode Stok: 644-028)
- 1x Rangkaian Full Duplex to Half Duplex interface converter berbasis IC 74241
- 2x Resistor 22K ¼ watt
- 1x Kabel jumper male-male
- Sarung tangan kain
- Beberapa kabel jumper
- Komputer
Adapun blok diagram dari aplikasi ini adalah sebagai berikut:
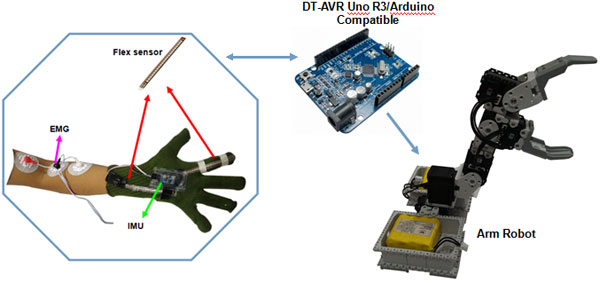
Gambar 1. Blok diagram AN-53.
Berikut adalah penjelasan singkat mengenai sensor-sensor yang digunakan dalam aplikasi:
- Flex Sensor 4.5 inch
Adalah sensor tekuk yang dipalikasikan untuk deteksi gerakan jari telunjuk dan pergelangan tangan. Flex sensor tidak lain adalah sebuah resistor yang nilai resistansinya bervariasi berdasarkan kelengkunagn yang diterapkan kepadanya. Oleh karena itu pembacaan flex sensor pada DT-AVR Uno R3 hanya perlu menggunakan ADC yang sudah terintegrasi pada Atmega328P. Koneksi dari flex sensor ke DT-AVR Uno R3 hanya memerlukan menambahkan reisistor dengan nilai tetap sebagai pembagi tegangan (pada apliaksi menggunakan 22k).
Gambar 2. Flex Sensor 4.5 inch.
- Grove - EMG Detector
Sensor EMG (Electromyography) merupakan kelompok dari sensor medis yaitu dipergunakan untuk mendeteksi adanya aktifitas kontraksi pada otot. Pada otot kerangka manusia seperti tendon lengan, aktifitas kontraksi menghasilkan sinyal listrik dengan jumlah yang kecil. EMG menangkap sinyal listrik tersebut melalui elektroda yang tertempel pada kulit. Sensor kemudian memperkuat sinyal listrik tersebut sehingga dapat diproses oleh perangkat prosesor menggunakan fasilitas ADC. Elektroda EMG bersifat sekali pakai karena terdiri dari gel konduktif. Sebelum elektroda EMG ditempelkan pada kulit, biasanya dilakukan terlebih dahulu proses pembersihan kulit menggunakan cairan pembersih guna menghilangkan debu yang dapat menghambat proses penangkapan sinyal listrik oleh sensor maupun keringat yang dapat mengurangi daya rekat elektroda. Pada aplikasi ini menggunakan tiga titik elektroda yang ditempelkan pada lengan dengan tata letak seperti dibawah ini: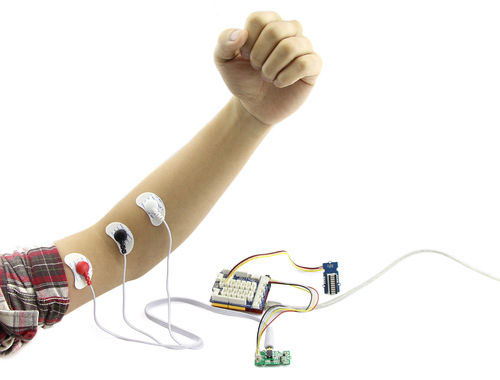
Gambar 3. Pemasangan EMG detector beserta elektrodanya.
- 10 DOF IMU Sensor (B) Low Power Consumption
Merupakan jenis sensor untuk menangkap gaya inersial. Pada aplikasi digunakan komponen sensor accelerometer 3-sumbu untuk mendeteksi sudut pitch dan roll tangan. Sedangkan magnetometer 3-sumbu digunakan untuk mendeteksi sudut yaw tangan.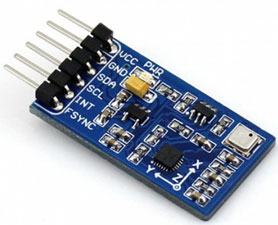
Gambar 4. 10 DOF IMU Sensor (B) Low Power Consumption.
Sebelum menghubungkan modul, rangkailah berbagai sensor pada sarung tangan dengan tata letak kurang lebih seperti gambar dibawah ini. Berbagai sensor dapat direkatkan pada sarung tangan menggunakan pita perekat maupun double tape. Pemasangan elektroda EMG dapat dilakukan terakhir kali ketika aplikasi akan diuji dikarenakan elektroda EMG bersifat sekali pakai saja.
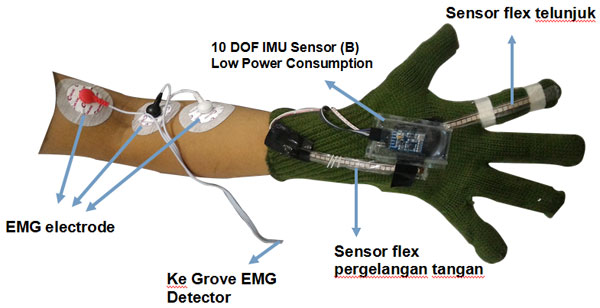
Gambar 3. Blok diagram AN-53.
Setelah semua sensor telah terpasang pada sarung tangan, lanjutkan untuk menyambungkan berbagai sensor dengan modul lainnya:
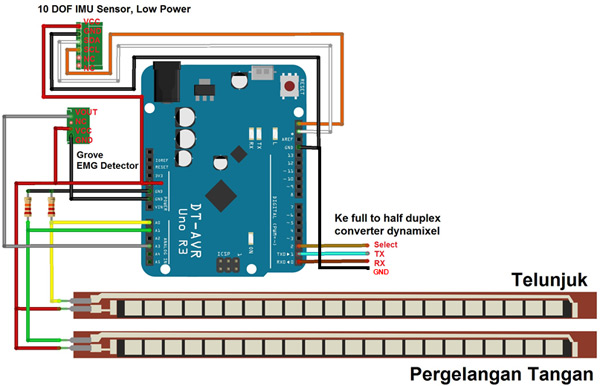
Gambar 3. Koneksi antar modul AN-53.
Setelah itu berikan catudaya ke aplikasi, gunakan Switching Adaptor 12V/3A (Kode Stok: 644-110) untuk robot lengan dan Switching Adaptor 12V/1A (Kode Stok: 644-028) untuk DT-AVR Uno R3.
Ketika semua koneksi antar modul dan sensor sudah lengkap, lanjutkan dengan melakukan proses upload program:
- Install Arduino IDE dengan destinasi pemasangan di direkori C:∖
- Tambahkan library DynamixelSerial, DynamixelSerial1, DynamixelSerial2 dan DynamixelSoftSerial dengan mengekstrak keseluruhan folder didalam berkas Wearable Controlled Arm Robot.zip ke folder library “C:∖Arduino∖libraries∖“.
- Jalankan program Arduino IDE.
- Atur board yang akan digunakan dengan memilih Tools – Board – Arduino Uno.
- Atur port serial yang akan digunakan pada Tools – Port – COMx (COMx disesuaikan dengan port serial DT-AVR Uno R3 yang muncul pada device manager).
- Buka contoh program yang disediakan yaitu Human_Arm_Kinematic.ino dengan melakukan navigasi di menu File – Examples – DMD . Lalu lakukan perintah upload sketch dengan menekan tombol upload (Jika terjadi kendala saat proses upload, coba lakukan troubleshooting dengan bantuan yang merujuk pada laman https://www.arduino.cc/en/guide/troubleshooting).
- Pada awal pengoperasian robot harus dilakukan kaliberasi nilai minumum dan makimum dari flex sensor dan EMG detector. Untuk melakukan kaliberasi, lakukanlah tahapan berikut ini:
- Untuk kaliberasi flex sensor telunjuk, short-kan pin 12 DT-AVR Uno R3 ke GND menggunakan kabel jumper male-male. Sesaat itu aplikasi akan masuk ke proses kaliberasi selama sekitar kurang lebih 5 detik. Pada waktu kaliberasi tekuk-luruskan jari telunjut selama beberapa kali agar program dapat membaca nilai maksimum dan minimum pembacaan sensor.
- Untuk kaliberasi flex sensor pergelangan tangan, short-kan pin 10 DT-AVR Uno R3 ke GND menggunakan kabel jumper male-male. Sama seperti proses telunjuk, gerakan sendi pergelangan tangan dengan menekuk-luruskan pergelangan tangan kedalam.
- Sedangkan untuk kaliberasi EMG detector pastikan lengan sudah terpasang elektroda EMG dengan detil pemasangan seperti pada Gambar 1,3,5 dan modul Grove EMG Detector sudah terpasang pada DT-AVR Uno R3. Untuk melakukan kaliberasi, short-kan pin 9 DT-AVR Uno R3 ke GND menggunakan kabel jumper male-male. Sesaat itu gerakaan lengan dengan menekuk siku dan meluruskan secara berulangkali selama 5 detik.
Selamat berinovasi!
All trademarks, company names, product names and trade names are the property of their respective owners.
All softwares are copyright by their respective creators and/or software publishers.